




■概要
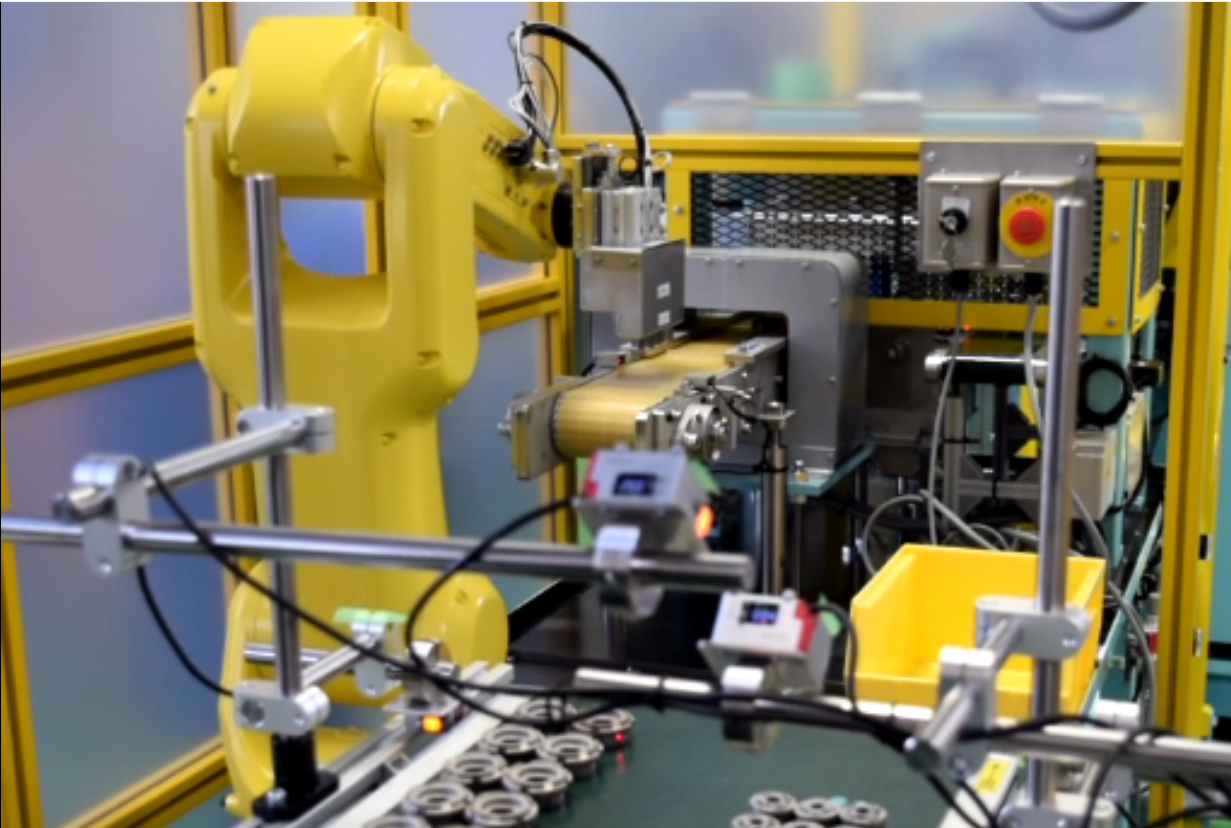
6軸多関節ロボットを使用して、流れているコンベヤからワークをピックアップするロボットシステムです。
コンベヤ上を流れてきた円形の焼結部品(ショックアブソーバー)を品種ごとに別けてストッカーに収納します。
■導入前
直行型シリンダーを使用した搬送システムですでに自動化を実施していましたが、このシステムでは対応できる対象ワークが少なく、新しく生産されたワークへのの追加が困難な状況でした。
■自動化内容
ファナック製6軸多間接ロボットを使用し、コンベヤ上を流れてきたワークをカメラで画像処理を行い検出し、次工程のコンベヤへハンドリングを行います。
その後、ワークはストッカーへ品種毎に収納されていきます。
■導入後
多品種、新品種への対応が可能となり、工程の生産能力が大きく向上しました。



