



■概要
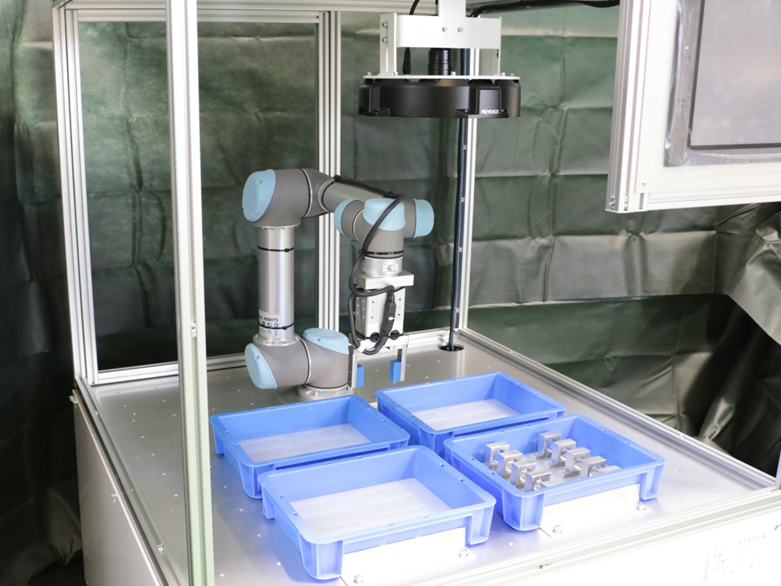
6軸多関節ロボットを使用した検査システムの自動化です。
対象となったワークはシャフトブロックです。カメラを用いて外観検査を実施しマスターワークに比べてOK,NGを判断し識別しました。
■導入前
キズなどの外観検査において、人手による目視判断で行っていたので検査結果が安定せず、NG品がOK品と混載してしまう事態が見受けられていました。
■自動化内容
カメラによる検査で正確な画像処理を行い、ワークの外観検査を検査をます。
又、ユニバーサルロボット製の協働ロボットを使用しているため、安全柵を必要としておりません。
■導入後
検査する人員を1人削減することができました。
ワークをロボットで取り出しするために、箱に並べる供給作業で人員は必要です。
また、検査結果をCSVファイルで取れるようになったため、人手による誤記や転記作業でのミスがなくなり、外観検査結果のデータ管理がやり易くなりました。



