




■概要
6軸多関節ロボットを使用したバリ取機への投入の自動化です。
対象となったワークは射出成形品です。
ロボットによる自動化の要件として、バリ取機へのワーク投入を行うだけでは投資対効果は出ないので、何かしら他の作業もロボットが実施する必要がありました。
■導入前
バリ取機への投入作業に1人、8時間体制で行っていました。
他に工程を見ると、バリ取り前に穴あけ、ネジ穴加工を行っていました。
■自動化内容
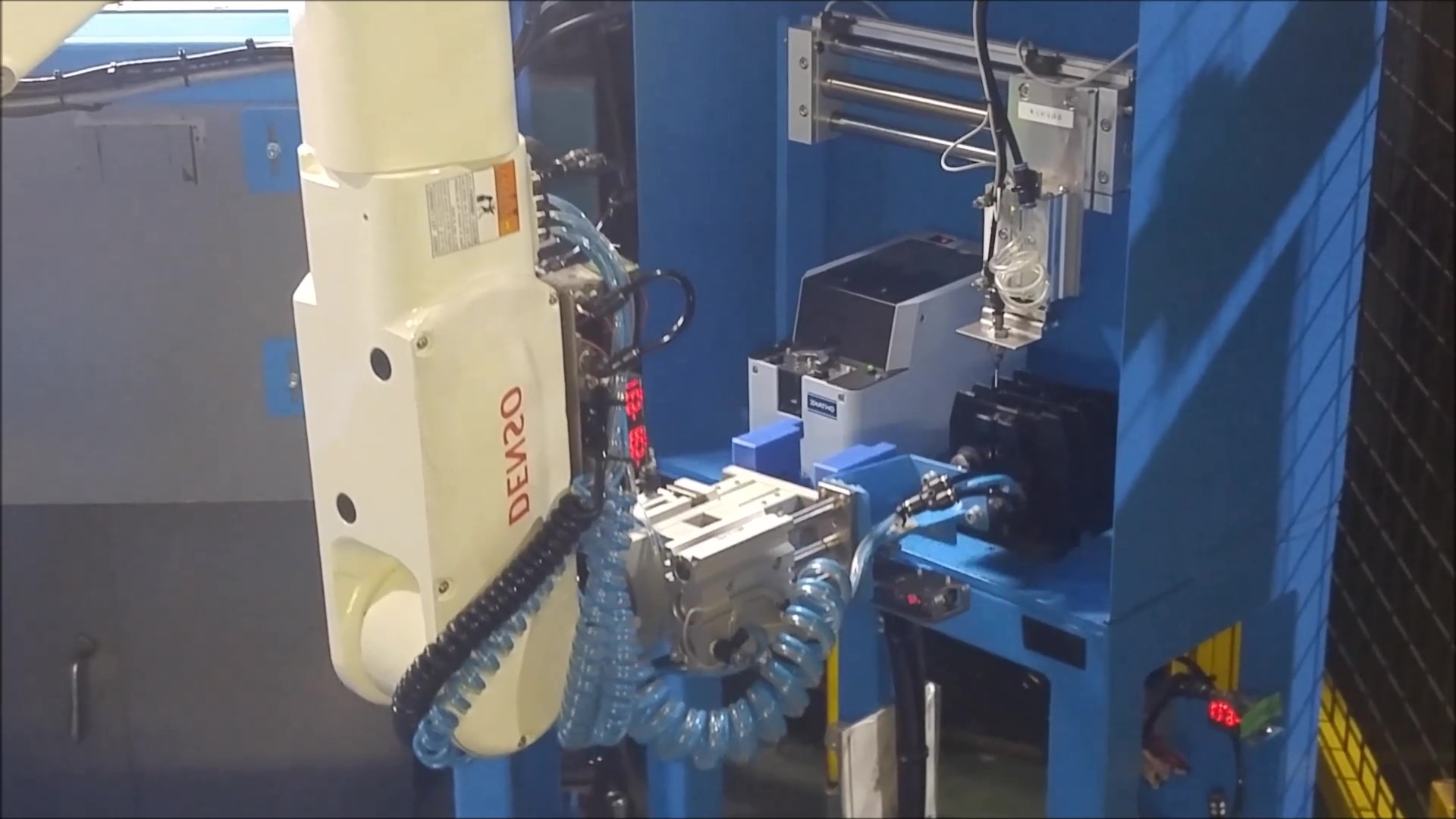
冶具に整列されたワークをDenso製の中型6軸多関節ロボットが取り出します。
次に、取り出したワークを検査、仮置きし、掴み換えてバリ取り機へ投入します。
ワークによっては穴あけ、ネジ穴加工を専用機で行いロボットが投入・取出しを行います。
ねじ穴加工機は改造し、PLCで制御できるようにして、ロボットシステムを作りました。
■導入後
バリ取機投入にかかわる人員を1人削減することができました。
自動化したい工程だけでなく、その前後工程を含めトータルでの自動化を考えることの重要さを感じました。



