


■概要
6軸多関節ロボットを使用した組立工程の自動化です。
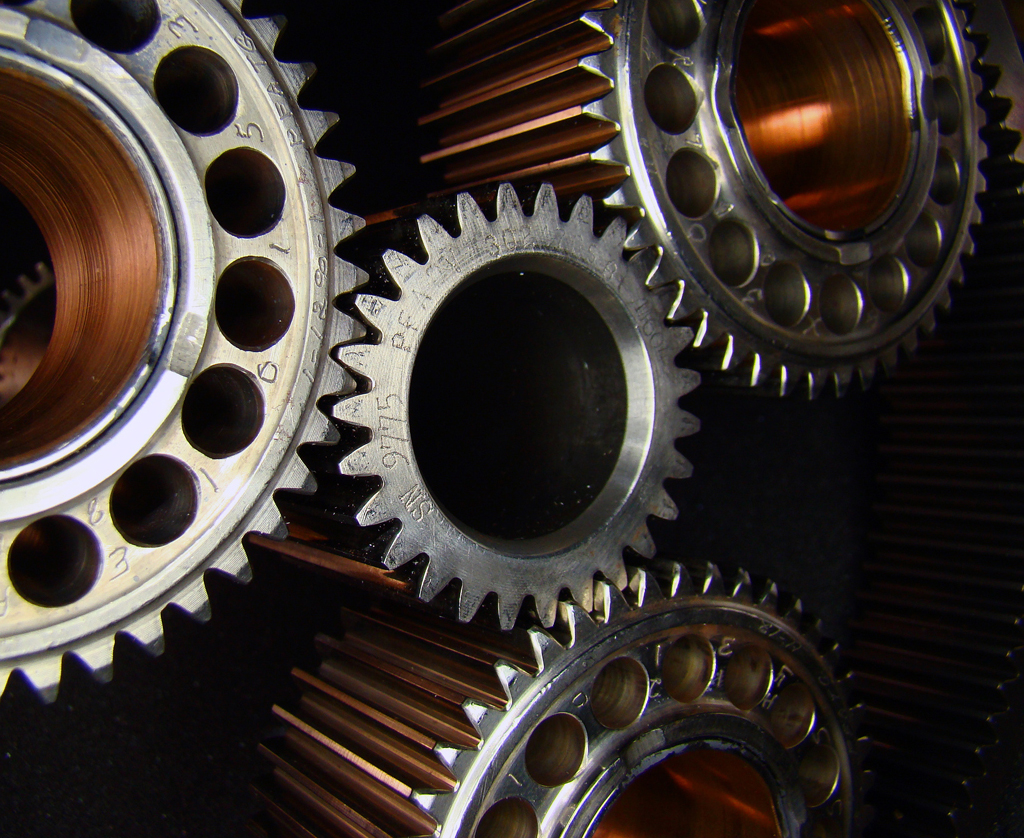
対象となったワークは減速機で、
ロボットで複数部品の組み立てを効率よく実施する必要がありました。
また、ワークを単純に組み合わせるだけでなく、回転させながら入れる等、
人ならではの動作があり、お客様ではロボットでの自動化をあきらめている状況でした。
■導入前
3人、24時間体制で行っていました。
一度にたくさんの数を処理する必要があったため、必要個数を入れ間違えることが
多発するなど、品質への影響がありました。
また、生産量も多く通常のロボットでは生産タクトタイムが合わない状況でした。
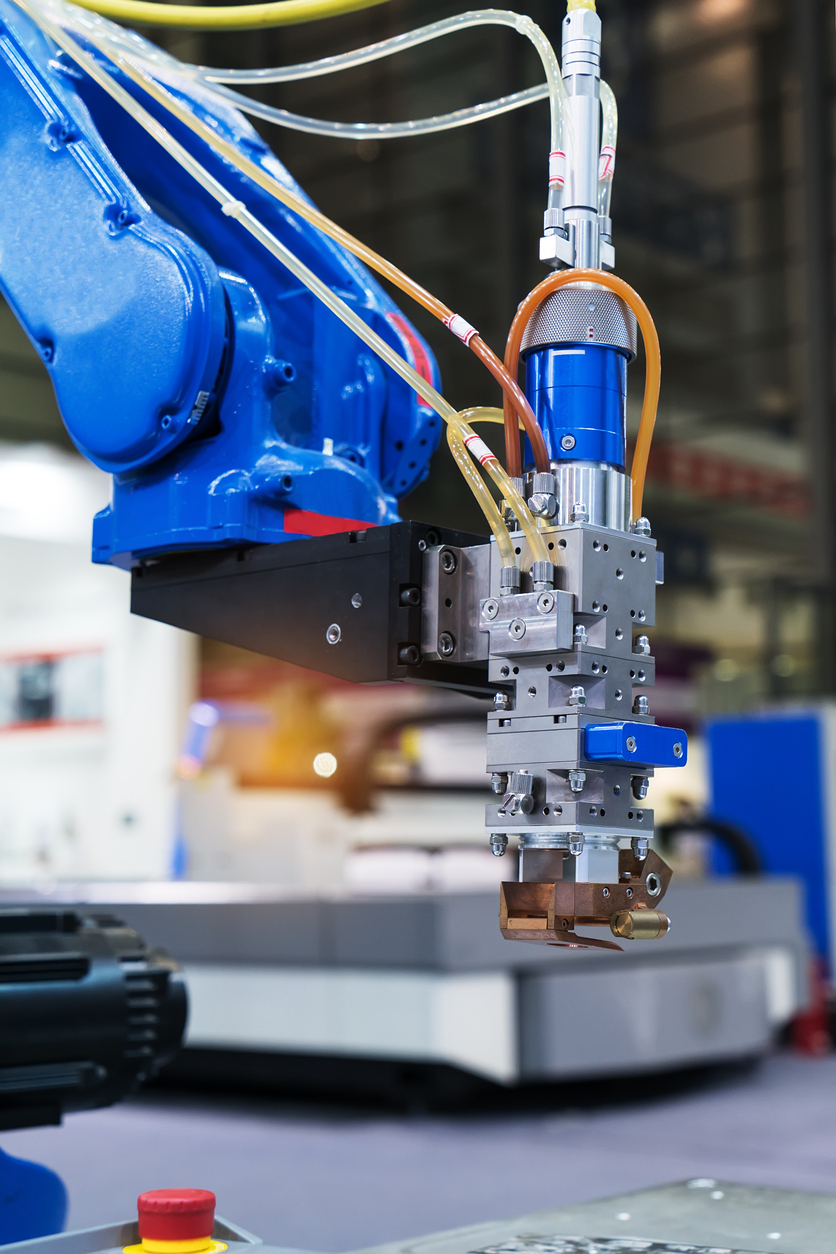
■自動化内容
組立に必要な複数の部品供給装置を作成し、安川電機製6軸多関節ロボットの周辺に配置しました。
また、ワークを取るハンドを製品毎に1対1で作成するのではなく、
一つのハンドで3つの部品をつかめるようにしました。
おかげで省スペースを実現することが出来ました。回転させながら歯車を組み合わせることはロボットにとっては相当難題でしたが、トライアンドエラーを繰り返し人と変わらない品質と速さでロボットでの組み立てを実現しました
■導入後
組立にかかわる人員を1.5人削減することができ、部品供給及び完成品の搬送のみに人手が必要な状況になり大きな生産性の向上を達成できました。
現在、この工程では1日に0.5人しかかかわっていません。



