


-
-

-
自動倉庫とロボット導入による完全自動化
適用分野: パレタイズ ロード・アンロード
産業分野: 産業機械業界 素材業界
ロボット分野: 多関節ロボット
労働生産性(概算): 30倍
投資回収期間(概算): 3年※上記はイメージ画像です。 多品種の部品生産のために主型を多数保有している。 人が主型の倉庫から目的の主型を取り出し、造型機に設置する作業を行っていた。 この作業が全体の生産性を押し下げていた <続きはこちらをクリック>
-
-
-
-
梱包工程におけるピッキングロボット導入
適用分野: 箱詰め
産業分野: 産業機械業界
ロボット分野: 多関節ロボット
労働生産性(概算): 5倍
投資回収期間(概算): 2年※上記はイメージ画像です。 これまでは作業者が発注内容に合わせて一つ一つの部品の梱包を行っていた。 発注量が多い日は作業者の負担がかなり大きくなっていた。 このことが発送の遅延に繋がっており、現場は非効率的 <続きはこちらをクリック>
-
-
-

-
金型の搬送装置
適用分野: その他
産業分野: 産業機械業界 素材業界 自動車業界
ロボット分野: その他
労働生産性(概算): 2倍
投資回収期間(概算): 5年■概要 大型金型の製品反転を自動で行います。 フォークリフトで搬送装置にワークをセットします。 前後、旋回動作をリモコンで操作できるので、所定の位置に正確に搬送出来ます。 限られたスペース内で動作可能な専用搬送装置となり <続きはこちらをクリック>
-
-
-

-
マグネットスイッチの自動カシメ装置
適用分野: その他 検査・計測
産業分野: 半導体・液晶業界 産業機械業界 電機業界
ロボット分野: その他
労働生産性(概算): 10倍
投資回収期間(概算): 2年■概要 マグネットスイッチの端子を自動的にかしめる装置です。 ■導入前 人手によって母材とピンをカシメ作業していました。 ■自動化内容 母材をピンフィーダーにより自動供給できるようにして、母材 <続きはこちらをクリック>
-
-
-
-
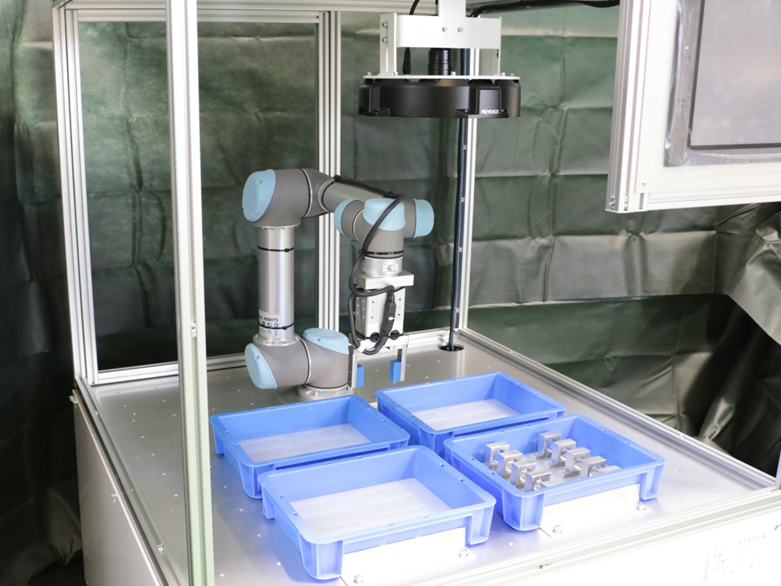
シャフトブロックの自動画像検査装置
適用分野: 検査・計測
産業分野: 半導体・液晶業界 建材業界 産業機械業界 自動車業界 電機業界
ロボット分野: 協働ロボット
労働生産性(概算): 3倍
投資回収期間(概算): 2年■概要 6軸多関節ロボットを使用した検査システムの自動化です。 対象となったワークはシャフトブロックです。カメラを用いて外観検査を実施しマスターワークに比べてOK,NGを判断し識別しました。 ■導入前 キズなどの外観検査 <続きはこちらをクリック>
-
-
-
-
切削加工機へのアルミダイカスト供給装置
適用分野: ハンドリング ロード・アンロード 検査・計測
産業分野: 半導体・液晶業界 産業機械業界 自動車業界
ロボット分野: 多関節ロボット
労働生産性(概算): 3倍
投資回収期間(概算): 3年■概要 6軸多関節ロボットを2台使用した加工機投入の自動化です。 対象となったワークは複合材料(アルミ)です。 ロボットによる自動化の要件として、加工機へのワーク投入を行うだけでなく、 人が実施していた時と同様の事をしな <続きはこちらをクリック>
-
-
-

-
ロボットでの建築用金具研磨システム
適用分野: バリ取り・研磨 ハンドリング
産業分野: 産業機械業界 自動車業界
ロボット分野: スカラーロボット 多関節ロボット
労働生産性(概算): 3倍
投資回収期間(概算): 3年■概要 6軸多関節ロボットを使用した研磨工程の自動化です。 対象となったワークはノブで、ロボットで3つの研磨工程を人と同じようにカバーしなければなりませんでした。 ■導入前 人手で研磨作業を1人、8時間体制で行っていまし <続きはこちらをクリック>
-
-
-
-
減速機のロボットによる組立
適用分野: その他 ハンドリング 組み立て
産業分野: 産業機械業界 自動車業界 電機業界
ロボット分野: 多関節ロボット
労働生産性(概算): 4倍
投資回収期間(概算): 4年■概要 6軸多関節ロボットを使用した組立工程の自動化です。 対象となったワークは減速機で、 ロボットで複数部品の組み立てを効率よく実施する必要がありました。 また、ワークを単純に組み合わせるだけでなく、回転させながら入れ <続きはこちらをクリック>
-


