


-
-

-
多関節ロボットによる検査判別の自動化事例
適用分野: ハンドリング 仕分け 検査・計測 箱詰め
産業分野: 機械部品製造業界
ロボット分野: その他 多関節ロボット
労働生産性(概算): 5倍
投資回収期間(概算): 3年■加工機への素材の投入および加工後の製品取出し、3次元測定機へのセット、 リセットを6軸多関節ロボットにより実現しました。 導入前 加工機への素材供給と芯振れの検査及び加工品を取出した後に3次測定機へのセットを行い、 良 <続きはこちらをクリック>
-
-
-

-
電力関連部品 加工~検査自動化
適用分野: ハンドリング 検査・計測
産業分野: 電機業界
ロボット分野: スカラーロボット 多関節ロボット
労働生産性(概算): 30倍
投資回収期間(概算): お問い合わせくださいこちらの工場では、電力に係る部品を製造しております。従来は前工程にて成形を行ったアルミ加工品を、 人の手を用いて穴あけ・カシメを行い、箱詰めを行っておりました。 ロボット導入後は、前工程から供給されてきたアルミ部品のピッ <続きはこちらをクリック>
-
-
-

-
洗面台の反転機
適用分野: ハンドリング 箱詰め 組み立て
産業分野: 建材業界 電機業界
ロボット分野: その他
労働生産性(概算): 4倍
投資回収期間(概算): 2年■概要 完成された洗面台の梱包作業を補助する、特注の反転機になります。 安全面を考慮して、安全柵を取り付けております。 一般的に反転機は金型やドラム缶、大型の鋼材など人間による反転が困難な”重量物”に用いられるものです。 <続きはこちらをクリック>
-
-
-
-
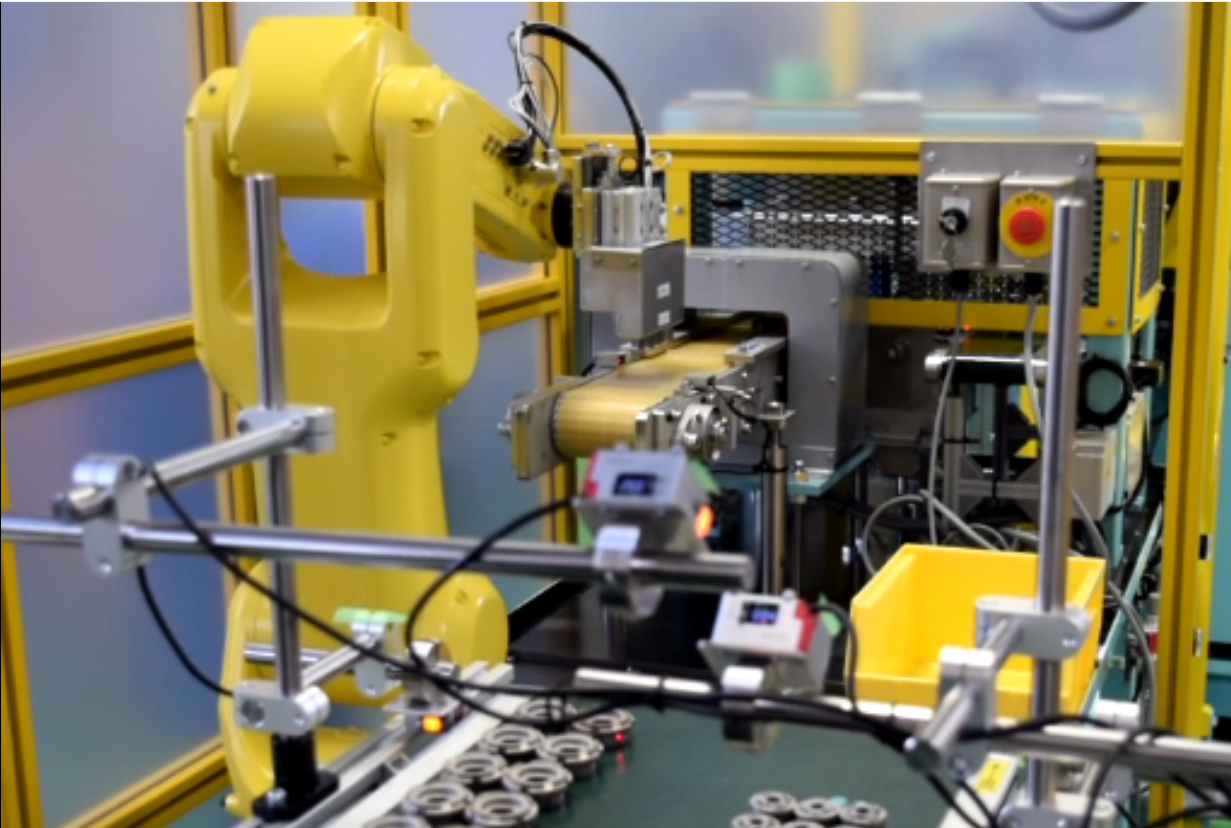
焼結炉からのワーク取り出しロボットシステム
適用分野: パレタイズ ハンドリング 検査・計測 箱詰め
産業分野: 自動車業界 電機業界
ロボット分野: 多関節ロボット
労働生産性(概算): 3倍
投資回収期間(概算): 3年■概要 6軸多関節ロボットを使用して、流れているコンベヤからワークをピックアップするロボットシステムです。 コンベヤ上を流れてきた円形の焼結部品(ショックアブソーバー)を品種ごとに別けてストッカーに収納します。 ■導入前 <続きはこちらをクリック>
-
-
-

-
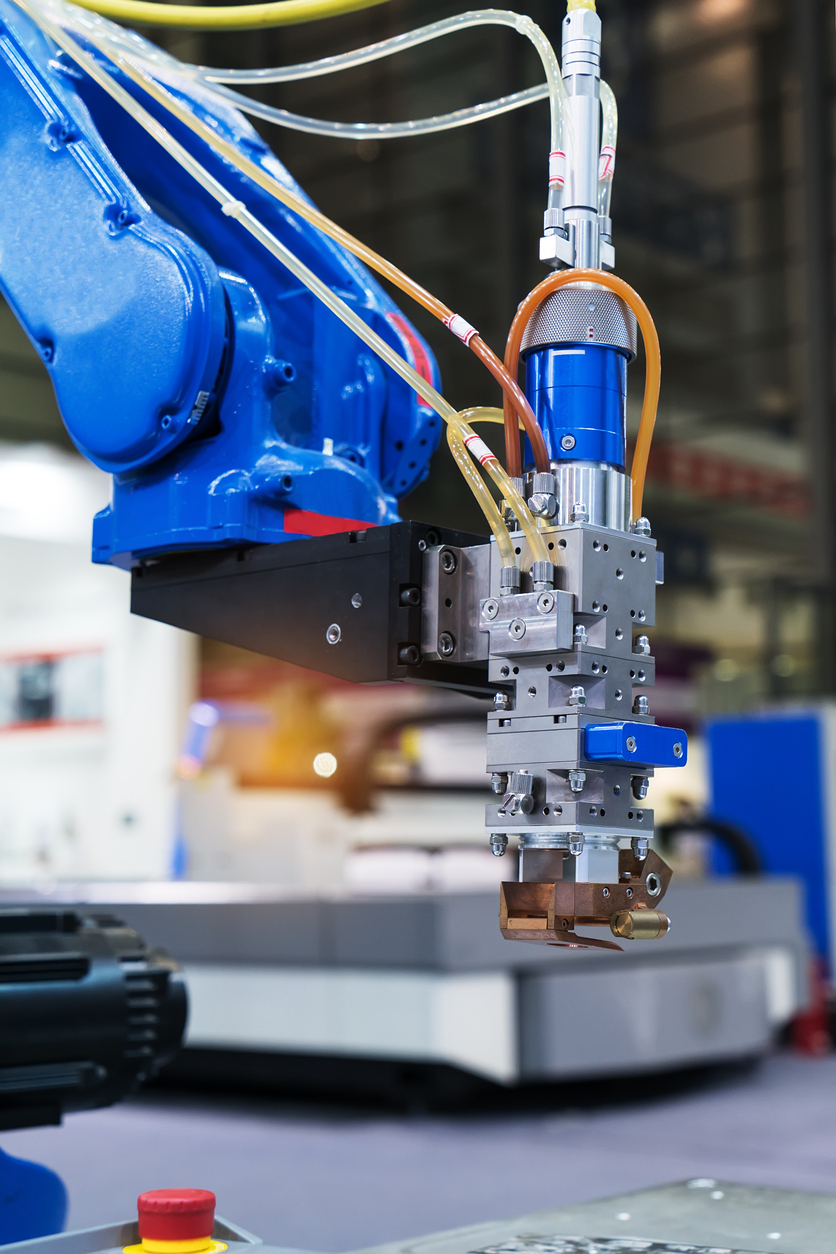
樹脂成型品のバリ取りローダー
適用分野: バリ取り・研磨 ハンドリング
産業分野: 自動車業界 電機業界
ロボット分野: 多関節ロボット 直交ロボット
労働生産性(概算): 2倍
投資回収期間(概算): 4年■概要 6軸多関節ロボットを使用したバリ取機への投入の自動化です。 対象となったワークは射出成形品です。 ロボットによる自動化の要件として、バリ取機へのワーク投入を行うだけでは投資対効果は出ないので、何かしら他の作業もロ <続きはこちらをクリック>
-
-
-
-
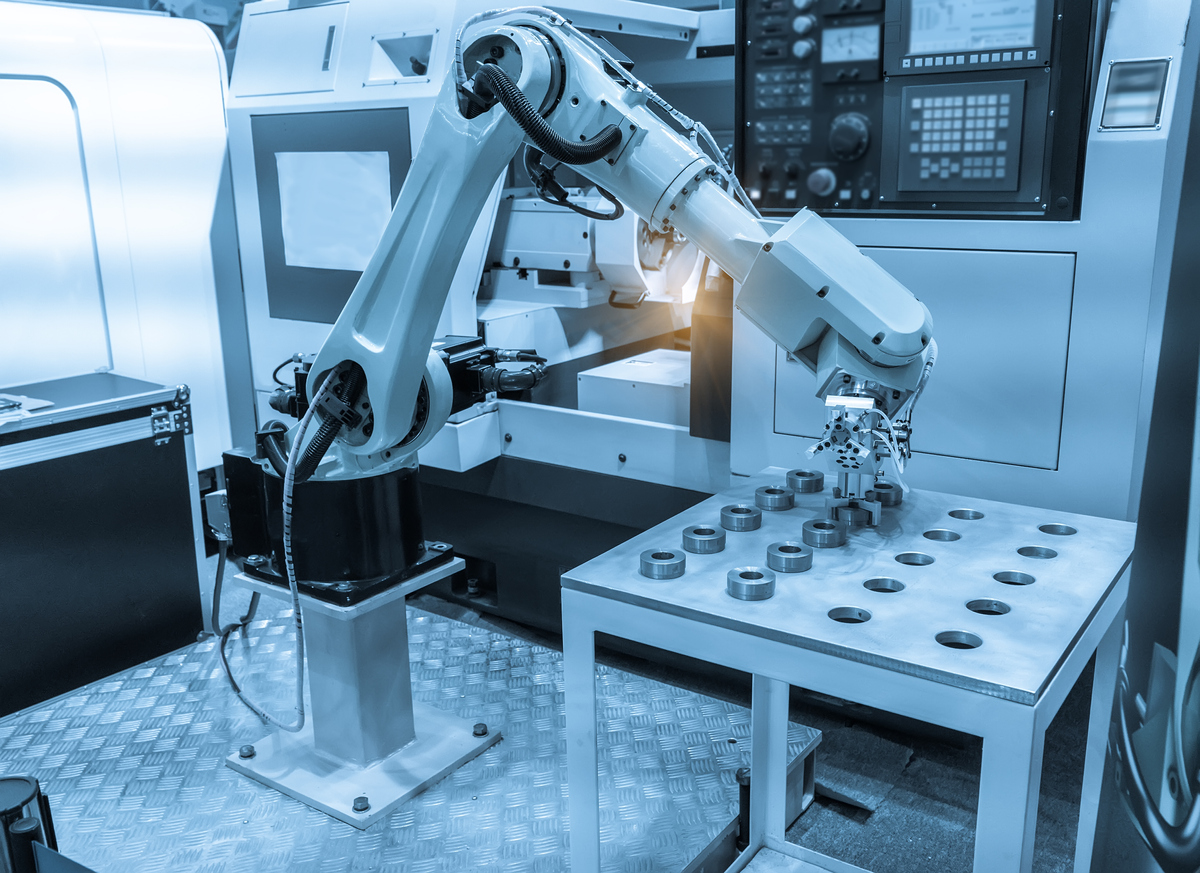
切削加工機へのアルミダイカスト供給装置
適用分野: ハンドリング ロード・アンロード 検査・計測
産業分野: 半導体・液晶業界 産業機械業界 自動車業界
ロボット分野: 多関節ロボット
労働生産性(概算): 3倍
投資回収期間(概算): 3年■概要 6軸多関節ロボットを2台使用した加工機投入の自動化です。 対象となったワークは複合材料(アルミ)です。 ロボットによる自動化の要件として、加工機へのワーク投入を行うだけでなく、 人が実施していた時と同様の事をしな <続きはこちらをクリック>
-
-
-

-
ロボットでの建築用金具研磨システム
適用分野: バリ取り・研磨 ハンドリング
産業分野: 産業機械業界 自動車業界
ロボット分野: スカラーロボット 多関節ロボット
労働生産性(概算): 3倍
投資回収期間(概算): 3年■概要 6軸多関節ロボットを使用した研磨工程の自動化です。 対象となったワークはノブで、ロボットで3つの研磨工程を人と同じようにカバーしなければなりませんでした。 ■導入前 人手で研磨作業を1人、8時間体制で行っていまし <続きはこちらをクリック>
-
-
-

-
食品用パウチの箱詰めロボットシステム
適用分野: その他 ハンドリング 検査・計測 箱詰め
産業分野: 食品・飲料業界
ロボット分野: パラレルリンク 直交ロボット
労働生産性(概算): 6倍
投資回収期間(概算): 5年■概要 パラレルリンクロボットとカメラによる画像処理を使用したパウチの箱詰めの自動化です。 大量のパウチを箱詰めする為、多くの人出を一時的に割いていました。 大量に箱詰めをするので、1つ当たり箱詰めに必要なタクトタイムは <続きはこちらをクリック>
-
-
-
-
減速機のロボットによる組立
適用分野: その他 ハンドリング 組み立て
産業分野: 産業機械業界 自動車業界 電機業界
ロボット分野: 多関節ロボット
労働生産性(概算): 4倍
投資回収期間(概算): 4年■概要 6軸多関節ロボットを使用した組立工程の自動化です。 対象となったワークは減速機で、 ロボットで複数部品の組み立てを効率よく実施する必要がありました。 また、ワークを単純に組み合わせるだけでなく、回転させながら入れ <続きはこちらをクリック>
-


